Copyright (c) 2010,2015 Jeremie DECOCK (http://www.jdhp.org)
- Web site: http://www.jdhp.org/projects_en.html#pyax12
- Online documentation: http://pyax-12.readthedocs.org
- Source code: https://github.com/jeremiedecock/pyax12
- Issue tracker: https://github.com/jeremiedecock/pyax12/issues
- PyAX-12 on PyPI: https://pypi.python.org/pypi/pyax12
In collaboration with http://www.vorobotics.com
PyAX-12 is an open source lightweight Python library to control Dynamixel AX-12+ actuators.
Note:
This project is still in beta stage, so the API is not finalized yet.
- Python >= 3.0
- Python-serial
PyAX-12 is tested to work with Python 3.4 under Gnu/Linux (Debian 8), MacOSX (Mavericks 10.9) and Windows (7). Any Python 3.X version under recent Gnu/Linux, MaxOSX and Windows systems should suit too.
PyAX-12 can also be run on Raspberry Pi through the GPIO connector.
Python-serial is the only dependency required to install PyAX-12.
Note:
If you use pip to install PyAX-12, Python-serial will be automatically
downloaded and installed (see the following install section).
You can install, upgrade, uninstall PyAX-12 with these commands (in a terminal):
pip install --pre pyax12 pip install --upgrade pyax12 pip uninstall pyax12
Or, if you have downloaded the PyAX-12 source code:
python3 setup.py install
You can install, upgrade, uninstall PyAX-12 with these commands (in a command prompt):
py -m pip install --pre pyax12 py -m pip install --upgrade pyax12 py -m pip uninstall pyax12
Or, if you have downloaded the PyAX-12 source code:
py setup.py install
You can install, upgrade, uninstall PyAX-12 with these commands (in a terminal):
pip install --pre pyax12 pip install --upgrade pyax12 pip uninstall pyax12
Or, if you have downloaded the PyAX-12 source code:
python3 setup.py install
There are several ways to link AX-12 actuators to a computer. Three different configurations are described here.
For mor information, check the official AX-12 documentation (archive).
The USB2Dynamixel can be used to connect AX-12 actuators to your computer. Actually, any FTDI serial/USB converter device should do the job.
For more information on USB2Dynamixel setup, check the official documentation.
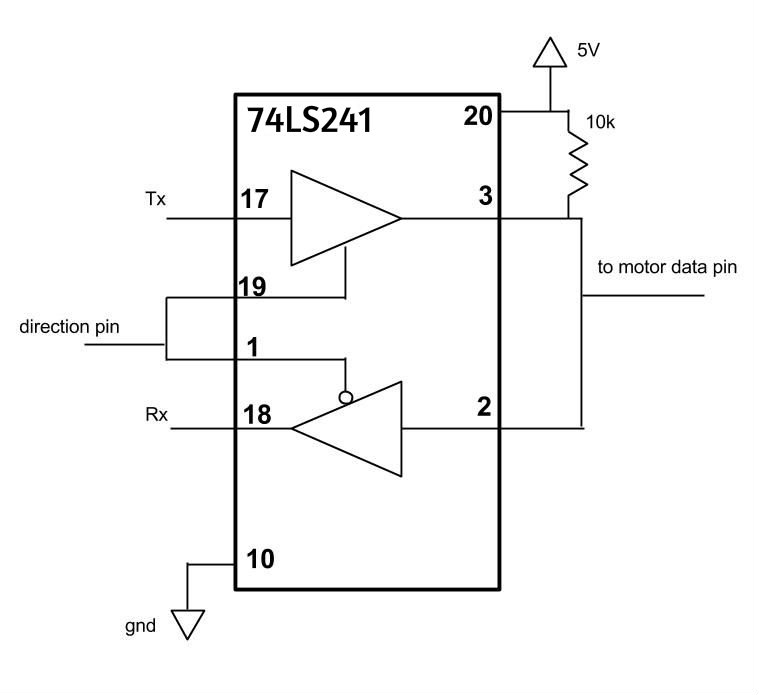
A small electronic circuit is needed to convert Raspberry Pi UART signals (on RX and TX pins) to the half-duplex ones required by Dynamixels (see this archive).
The chips that converts full-duplex into half-duplex are either 74HC126/74HC04 or 74LS241.
Here are the schematics of the electronic circuit required to control Dynamixel AX-12 with the 74LS241.


Additional explanation can be found on the following pages:
- http://www.oppedijk.com/robotics/control-dynamixel-with-raspberrypi
- http://memememememememe.me/post/the-dynamixel-ax-12a-servos/
- http://robottini.altervista.org/dynamixel-ax-12a-and-arduino-how-to-use-the-serial-port
- http://savageelectronics.blogspot.fr/2011/01/arduino-y-dynamixel-ax-12.html
A PCB by Thiago Hersan is freely available here:
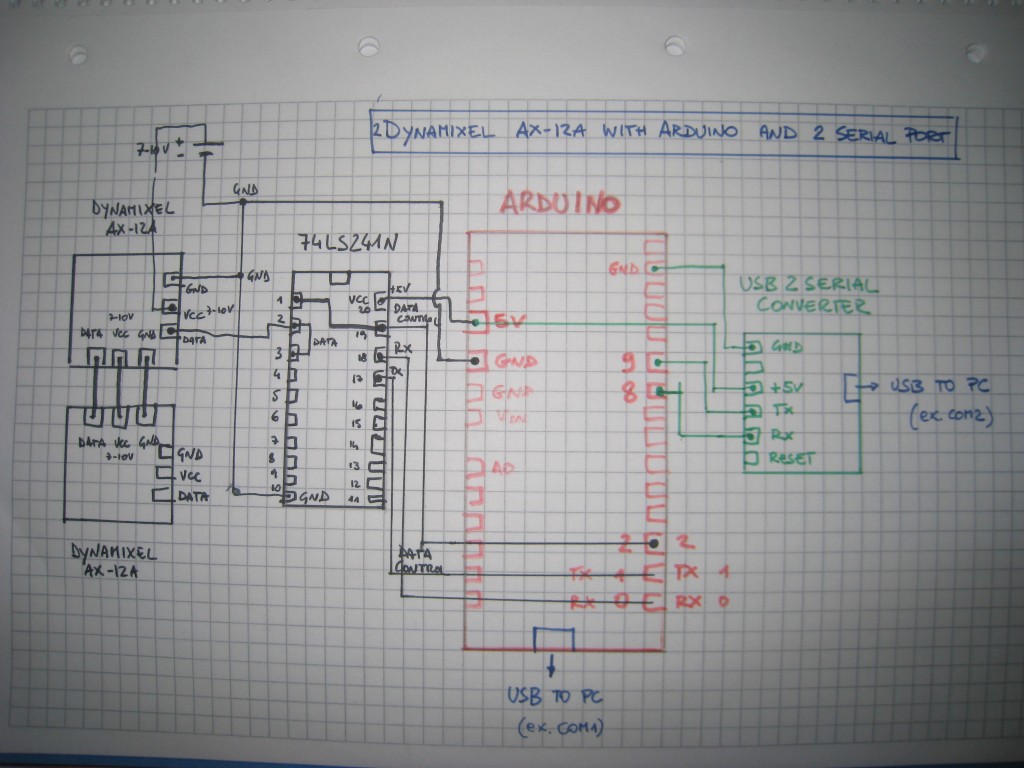
For other schematics, check the following pages:
- http://memememememememe.me/assets/posts/the-dynamixel-ax-12a-servos/uart_half-duplex_74LS241.jpg
- https://circuits.io/circuits/267189-ax-12-driver-for-raspberry-pi/#schematic
- http://robottini.altervista.org/wp-content/uploads/2011/12/Dynamixel-Arduino-electric-schema-1024x768.jpg (this one doesn't link pins 3 and 20 by a resistor)
{kind=link}
{kind=link}
For the 74HC126/74HC04, check the following page:
- Robotis support (archive)
Increasing the bandwidth up to 1Mbps may require a special setup (not tested yet):
Otherwise keeping the bandwidth to 57600bps should work out of the box (make sure you use the right Dynamixel ID and the Dynamixel bandwidth is properly setup to 56700bps).
See also: https://github.com/jeremiedecock/raspberry-pi-python-snippets/tree/master/dynamixel_ax12
- Online Documentation: http://pyax-12.readthedocs.org
- API Documentation: http://pyax-12.readthedocs.org/en/latest/api.html
In the following examples, the dynamixel_id, port and baudrate
values should be adapted depending on your configuration:
- for Linux users:
- the
portvalue should be something like- "/dev/ttyS0", "/dev/ttyS1", ... if you use an actual serial port
- "/dev/ttyUSB0", "/dev/ttyUSB1", ... if you use an USB to serial adapter (like the USB2Dynamixel adapter)
- the
baudratevalue should be the same than the one configured in Dynamixel units
- the
- for Windows users:
- the
portvalue should be something like "COM2", "COM3", ... (see the COM port configuration in the Windows device manager) - the
baudratevalue should be the same than the one configured in the Dynamixel units and the Windows device manager (i.e. check the COM port configuration in the Windows device manager)
- the
- for MacOSX users:
- the
portvalue should be something like "/dev/tty.usbserial-XXX" if you use an USB to serial adapter like the USB2Dynamixel adapter - the
baudratevalue should be the same than the one configured in Dynamixel units
- the
- for Raspberry Pi users:
- if you want to control AX-12 actuators through GPIO connector, don't forget
to set
rpi_gpiotoTruein theConnectionconstructor (check the first following example) - the
portvalue should be "/dev/ttyAMA0"
- if you want to control AX-12 actuators through GPIO connector, don't forget
to set
If you use the USB2Dynamixel device, make sure its switch is set on "TTL".
Some other examples are available in the examples directory.
This snippet prints True if the specified Dynamixel unit is connected and
available at the given baudrate; otherwise it prints False.
from pyax12.connection import Connection # Connect to the serial port serial_connection = Connection(port="/dev/ttyUSB0", baudrate=57600) dynamixel_id = 3 # Ping the third dynamixel unit is_available = serial_connection.ping(dynamixel_id) print(is_available) # Close the serial connection serial_connection.close()
Raspberry Pi users who connected AX-12 actuators to the GPIO connector should use the following code instead:
from pyax12.connection import Connection # Connect to the serial port serial_connection = Connection(port="/dev/ttyAMA0", rpi_gpio=True) dynamixel_id = 3 # Ping the third dynamixel unit is_available = serial_connection.ping(dynamixel_id) print(is_available) # Close the serial connection serial_connection.close()
This snippet prints the ID list of connected and available Dynamixel units (at the given baudrate).
from pyax12.connection import Connection
# Connect to the serial port
serial_connection = Connection(port="/dev/ttyUSB0", baudrate=57600)
# Ping the dynamixel unit(s)
ids_available = serial_connection.scan()
for dynamixel_id in ids_available:
print(dynamixel_id)
# Close the serial connection
serial_connection.close()
This snippet prints the control table of the specified Dynamixel unit (i.e. the internal state information of the Dynamixel unit).
from pyax12.connection import Connection # Connect to the serial port serial_connection = Connection(port="/dev/ttyUSB0", baudrate=57600) dynamixel_id = 1 # Print the control table of the specified Dynamixel unit serial_connection.pretty_print_control_table(dynamixel_id) # Close the serial connection serial_connection.close()
This snippet should print something like that:
model_number................. AX-12+ firmware_version............. 24 id........................... 1 baud_rate.................... 57142.9 bps return_delay_time............ 500 µs cw_angle_limit............... -150.0° (0) ccw_angle_limit.............. 150.0° (1023) max_temperature.............. 70°C min_voltage.................. 6.0V max_voltage.................. 14.0V max_torque................... 1023 status_return_level.......... 2 (respond to all instructions) input_voltage_alarm_led...... off angle_limit_alarm_led........ off overheating_alarm_led........ on range_alarm_led.............. off checksum_alarm_led........... off overload_alarm_led........... on instruction_alarm_led........ off input_voltage_alarm_shutdown. off angle_limit_alarm_shutdown... off overheating_alarm_shutdown... on range_alarm_shutdown......... off checksum_alarm_shutdown...... off overload_alarm_shutdown...... on instruction_alarm_shutdown... off down_calibration............. 46 up_calibration............... 972 torque_enabled............... yes led.......................... off cw_compliance_margin......... 0.3° (1) ccw_compliance_margin........ 0.3° (1) cw_compliance_slope.......... 9.4° (32) ccw_compliance_slope......... 9.4° (32) goal_position................ -0.1° (511) moving_speed................. 512 torque_limit................. 1023 present_position............. -0.1° (511) present_speed................ 0 present_load................. 0 present_voltage.............. 12.1V present_temperature.......... 43°C registred_instruction........ no moving....................... no locked....................... no punch........................ 32
This snippet moves the first Dynamixel unit to 0°, then -45°, -90°, -135°, -150° (the maximum CW angle), +150° (the maximum CCW angle), +135°, +90°, +45° and finally goes back to 0°.
from pyax12.connection import Connection import time # Connect to the serial port serial_connection = Connection(port="/dev/ttyUSB0", baudrate=57600) dynamixel_id = 1 # Go to 0° serial_connection.goto(dynamixel_id, 0, speed=512, degrees=True) time.sleep(1) # Wait 1 second # Go to -45° (45° CW) serial_connection.goto(dynamixel_id, -45, speed=512, degrees=True) time.sleep(1) # Wait 1 second # Go to -90° (90° CW) serial_connection.goto(dynamixel_id, -90, speed=512, degrees=True) time.sleep(1) # Wait 1 second # Go to -135° (135° CW) serial_connection.goto(dynamixel_id, -135, speed=512, degrees=True) time.sleep(1) # Wait 1 second # Go to -150° (150° CW) serial_connection.goto(dynamixel_id, -150, speed=512, degrees=True) time.sleep(1) # Wait 1 second # Go to +150° (150° CCW) serial_connection.goto(dynamixel_id, 150, speed=512, degrees=True) time.sleep(2) # Wait 2 seconds # Go to +135° (135° CCW) serial_connection.goto(dynamixel_id, 135, speed=512, degrees=True) time.sleep(1) # Wait 1 second # Go to +90° (90° CCW) serial_connection.goto(dynamixel_id, 90, speed=512, degrees=True) time.sleep(1) # Wait 1 second # Go to +45° (45° CCW) serial_connection.goto(dynamixel_id, 45, speed=512, degrees=True) time.sleep(1) # Wait 1 second # Go back to 0° serial_connection.goto(dynamixel_id, 0, speed=512, degrees=True) # Close the serial connection serial_connection.close()
To search for bugs or report them, please use the PyAX-12 Bug Tracker at:
https://github.com/jeremiedecock/pyax12/issues
Other libraries to control Dynamixel AX-12+ actuators are referenced in the following (non comprehensive) list:
- PyPot by Inria (FLOWERS team)
- PyDynamixel by Richard Clark
- Pydyn by Fabien Benureau and Olivier Mangin (Inria FLOWER team)
- Dynamixel by Ian Danforth
- dynamixel_hr by Romain Reignier
- python_dynamixels by Jesse Merritt
- ax12 by Thiago Hersan
- Dynamixel Monitor by Christian Balkenius
- DynamixelMonitor by Slavik
The PyAX-12 library is provided under the terms and conditions of the
MIT License.