This is the localization module for 2021 Independent study: CAD2CAV which focuses on multi-agent indoor navigation using floor map information.
Localization is done using MCL algorithm using a reference occupancy map generated from the floor plan using Auto Mapping.
The localization performance using particle filter only:

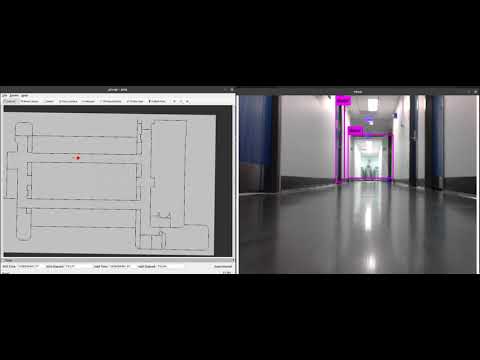
To utilize as much information as possible from the floor map, detect landmarks that have been marked in floor plan to enhance localization in narrow hallway and/or big empty space. The landmark detection module uses a fine tuned YOLO model to do real-time object detection, and by comparing the landmark detection with floor plan we can update the particles accordingly. Read this for an algorithm walkthrough.
The localization performance with landmark detection:
To run this, you need to ensure that both the map_server ROS package, and the python wrappers for RangeLibc are installed.
For the map server:
sudo apt-get update
rosdep install -r --from-paths src --ignore-src --rosdistro kinetic -y
For RangeLibc:
sudo pip install cython
git clone http://github.com/kctess5/range_libc
cd range_libc/pywrappers
# on VM
./compile.sh
# on car - compiles GPU ray casting methods
./compile_with_cuda.sh
The majority of parameters you might want to tweak are in the launch/localize.launch file. You may have to modify the "odometry_topic" or "scan_topic" parameters to match your environment.
roslaunch particle_filter localize.launch
To enable the Rviz for particle and trajectory visualization, as well as video playback, use:
roslaunch particle_filter localize_viz.launch
Once the particle filter is running, you can visualize the map and other particle filter visualization message in RViz. Use the "2D Pose Estimate" tool from the RViz toolbar to initialize the particle locations.
See launch/localize.launch for docs on available parameters and arguments.
The "range_method" parameter determines which RangeLibc ray casting method to use. The default is cddt because it is fast and has a low initialization time. The fastest option on the CPU is "glt" but it has a slow startup. The fastest version if you have can compile RangeLibc with CUDA enabled is "rmgpu". See this performance comparison chart:

This code is the staff solution to the lab guide found in the /docs folder. A mathematical derivation of MCL is available in that guide.
There is also documentation on RangeLibc in the /docs folder.
The code itself also contains comments describing purpose of each method.
This library accompanies the following publication.
@article{walsh17,
author = {Corey Walsh and
Sertac Karaman},
title = {CDDT: Fast Approximate 2D Ray Casting for Accelerated Localization},
volume = {abs/1705.01167},
url = {http://arxiv.org/abs/1705.01167},
year = {2017}}