A real-time dynamic clamp (host) controller for the live pyClamp (client) interface
dyClamp is a further development of the dynamic_clamp sketch with a focus on a robust serial communication between the Teensy and its controlling host computer: The current implementation allows scientists to alter the behavior of the dynamic clamp system at runtime - by transmitting updates for calibration parameters, conductance values or by remotely triggering custom events. Furthermore, the low-latency design of Teensyduino USB Serial Communication enables a continuous flow of information from and to the host - with a minimal effect on the cycle times of the dynamic clamp system.
Video demonstration 🎥 (6.5 MiB, H.264/MPEG-4 AVC) of dyClamp and pyClamp producing and monitoring a current command for the Axopatch 200B amplifier.
Cross-reference: pyClamp is a feature-complete graphical user interface written in Python to demonstrate the flexibility of this novel dynamic clamp implementation.
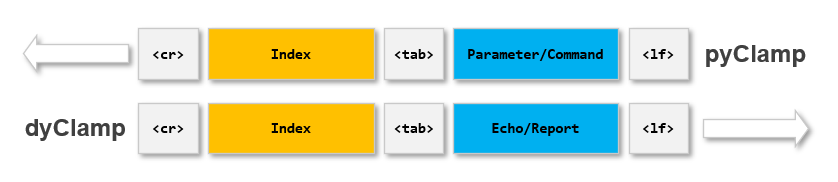
In short, the information exchanged between the Teensy and its host via the serial connection follows a simple formal convention: A new string of information begins with a carriage return character <cr> and ends with a linefeed character <lf>, while values embedded in this frame are separated by tabulator characters <tab>.
Example:
<cr> value1 <lf>
<cr> value1 <tab> value2 <lf>
<cr> value1 <tab> value2 <tab> value3 <lf>
Arduinos use floating-point numbers to represent decimal values internally - with up to seven digits of precision. However, the serial communication with UTF-8 encoding limits the precision of transferred values to two decimal digits. If you need to transmit values with a maximum precision, communicate those values as integers instead and divide them by the appropriate decimal power after the transfer.
The Teensy will interpret information strings ("commands") from the controlling host based on value1 and value2. The first value (index) indicates the type of command, while the second value represents an updated value or a pre-defined command case (command subtype).
- All positive command indices are indicating update commands for the array of calibration parameters.
/* This command changes the first value (at index 0) of the array of calibration parameters to "1.23". */
<cr> 1.0 <tab> 1.23 <lf>
- All negative command indices are indicating update commands for the array of conductance values.
/* This command changes the third value (at index 2) of the array of conductance values to "5.67". */
<cr> -3.0 <tab> 5.67 <lf>
- All command indices with a value of zero are generally interpreted as execution commands, with the second value indicating the subtype of the command.
/* This command does nothing by itself, except that it produces an echo to the host - see below.
However, this command can still be useful to "ping" the Teensy when establishing a new connection. */
<cr> 0.0 <tab> 0.0 <lf>
/* Sends calibration parameters and conductance values to the host.
These values can be interpreted by the host to confirm a successful transmission. */
<cr> 0.0 <tab> 1.0 <lf>
All command strings are echoed to the controlling host to indicate a successful transmission of the command.
Besides the echo of a command string that is exclusively sent on-demand, the Teensy can additionally provide a continuous stream of information to its host upon request (live reports).
/* Toggles live reports of selected values on/off that are sent to the host continuously. */
<cr> 0.0 <tab> 2.0 <lf>
The Teensy will then start to report data values live representing the current state of internal values. The transmitted data can be useful to observe parameters during experiments or to debug new current models.
/* Continuous stream of information from the Teensy, reporting the latest values of
the membrane potential [mV], the injected current [pA], and the cycle time [µs]. */
<cr> -65.1 <tab> 1.1 <tab> 9.0 <lf>
<cr> -64.9 <tab> 1.3 <tab> 10.0 <lf>
<cr> -64.7 <tab> 1.4 <tab> 9.0 <lf>
<cr> -65.4 <tab> 1.0 <tab> 9.0 <lf>
...
In order to reduce information overhead and therefore transmission latency, the information in the report strings is encoded positionally - in contrast to the command strings that use indices for the update of individual values.
Furthermore, the present implementation temporarily discontinues the generation of live reports when a new command string has arrived at its input buffer. This behavior avoids interpretation conflicts on the host side (i.e. a command string echo being interpreted as a live report with two values).
In addition to the serial communication tweaks mentioned above, dyClamp is dynamically throttling its generation of live reports based on the availability of the serial output buffer. While this behavior does not guarantee a prompt transmission to the host system, it makes sure that data generation is synchronous with data representation.
If you want to use dyClamp in your dynamic clamp setup, you'll need recent versions of Arduino and Teensyduino to compile and upload the present sketch to your Teensy. These are my version recommendations:
- Arduino (>= 1.8.8)
- Teensyduino (>= 1.4.5)
Make sure to optimize Arduino's settings and compilation parameters in order to enable the serial connection and to improve the computational performance of your dynamic clamp setup. The settings in Arduino's "Tools" menu should be set to the following values:
- Board: "Teensy 3.6"
- USB Type: "Serial"
- CPU Speed: "180 MHz"
- Optimize: "Faster with LTO"
- Port: "COMx (Teensy)"
Depending on the computational costs of your current simulations, dyClamp usually completes its cycles of voltage readout, current calculation, and current injection ("cycle time") in 10 µs or less - while at the same time enabling serial communication from and to the controlling host.
The Teensy 4.0 can be used as well: However, it lacks an onboard digital-to-analog (DAC) converter. In addition, the analog-to-digital (ADC) conversion takes up to 20 µs due to changes in the default configuration for sample averaging.
I would like to thank Cathy Proenza, Niraj Desai, and Andrew Scallon for providing resources and valuable feedback during the development process.
If you would like to participate in the development, please fork this repository to your GitHub account. In order to report a problem, please create a new issue in this repository.
Your feedback is welcome! Please contact me at GitHub or via e-mail.