{kind=link}
{kind=link}
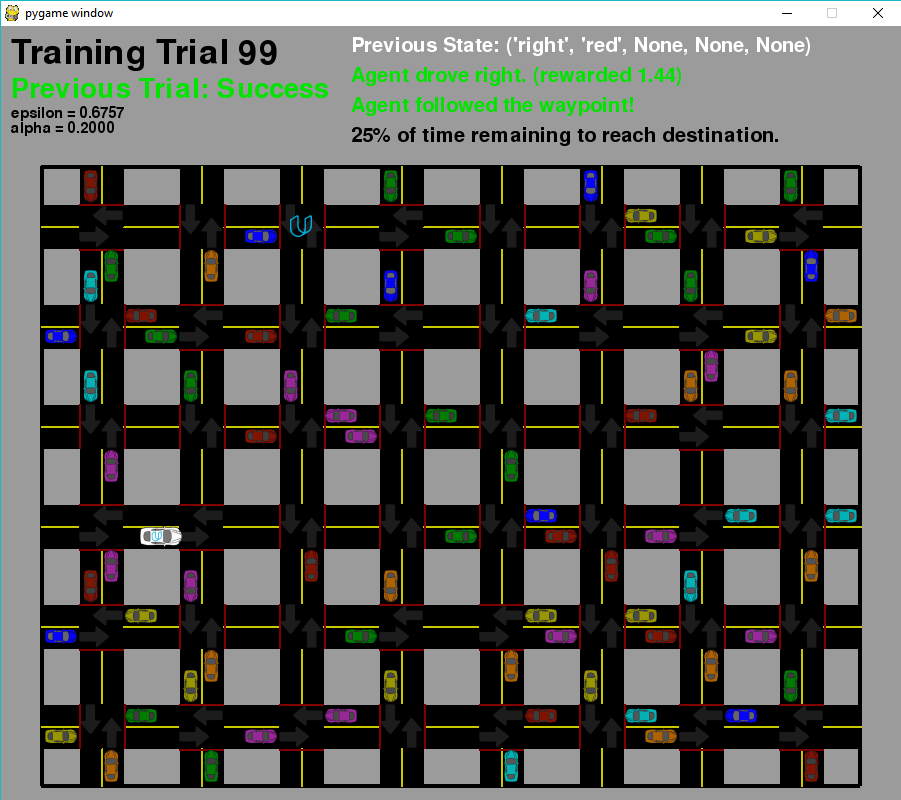
In the not-so-distant future, taxicab companies across the United States no longer employ human drivers to operate their fleet of vehicles. Instead, the taxicabs are operated by self-driving agents — known as smartcabs — to transport people from one location to another within the cities those companies operate. In major metropolitan areas, such as Chicago, New York City, and San Francisco, an increasing number of people have come to rely on smartcabs to get to where they need to go as safely and efficiently as possible. Although smartcabs have become the transport of choice, concerns have arose that a self-driving agent might not be as safe or efficient as human drivers, particularly when considering city traffic lights and other vehicles. To alleviate these concerns, your task as an employee for a national taxicab company is to use reinforcement learning techniques to construct a demonstration of a smartcab operating in real-time to prove that both safety and efficiency can be achieved.
applying reinforcement learning techniques for a self-driving agent in a simplified world to aid it in effectively reaching its destinations in the allotted time.
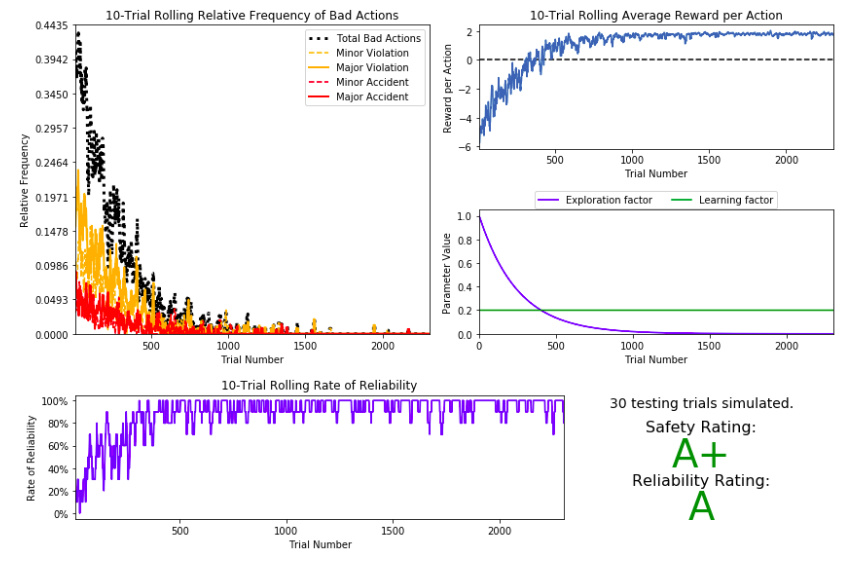
final optimized Q-Learning rate.
This project requires Python 2.7 with the pygame library installed
In a terminal or command window, navigate to the top-level project directory smartcab/ (that contains this README) and run one of the following commands:
python smartcab/agent.py
python -m smartcab.agent
This will run the agent.py file and execute your agent code.