Home
dvrk_gravity_compensation mainly consists of 4 processes:
- wizard_config_dataCollection
- dataCollection
- mlse
- gc_controller
The figure shows the overview flow of the codes.
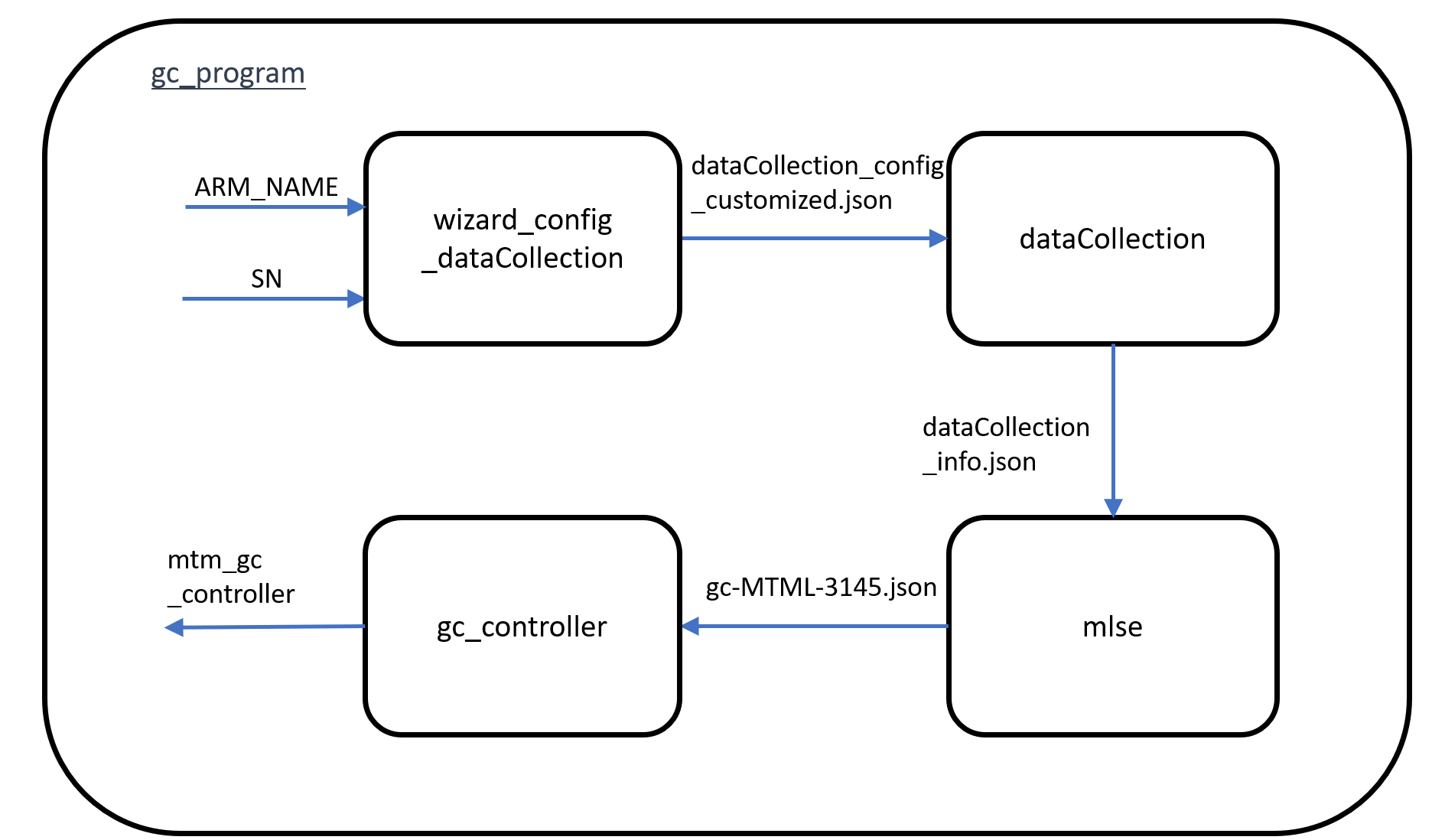
Input arguments:
- ARM_NAME:'MTML' or 'MTMR' (left or right Master Tool Manipulator)
- SN :'12345' (Serial Number of MTM)
Read JSON file (Hardcode):
- dataCollection_config.json (JSON file which stores configuration of trajectory and constraints in dataCollection)
Output file:
- dataCollection_config_customized.json (Customized JSON file which stores configuration of trajectory and constraints in dataCollection)
Input arguments:
- dataCollection_config_customized.json
Save data path :
- '..\GC_Data_stable <ARM_NAME>_<Current-date-and-time>'(For example: '..\GC_Data_stable\MTML_12345\November-28-2018-18:04:11')
Output file:
- dataCollection_info.json (JSON file which stores configuration of dataCollection and some general information)
Input arguments:
- dataCollection_info.json
Ouput file:
- gc-<ARM-Name>-<SN>.json (JSON file which stores dynamics parameters and other parameters for gc controller
Input arguments:
- gc-<ARM-Name>-<SN>.json
Output file:
- mtm_gc_controller (Gravity compensation controller class object)