You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
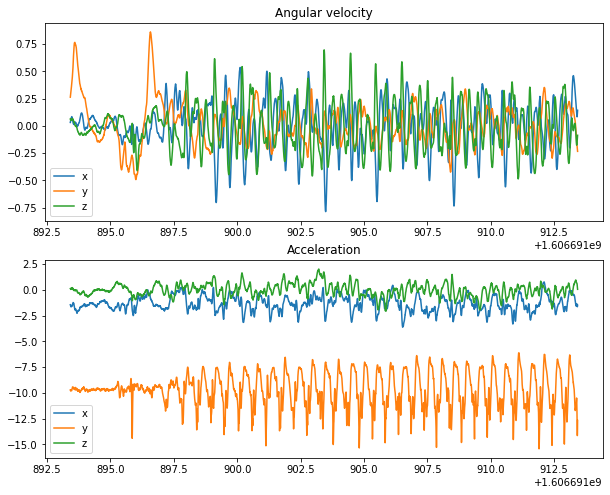
When looking at the datasheet of the ADIS16448 and your paper, your dataset should have X to the right of the helmet, Z axis to the front and Y axis down. This can be confirmed with the bag values (please correct me if I'm wrong)
Similar, the camera matrix rotation need to be corrected to fit the IMU as this is the body frame (as indicated in the paper).
Question: Where do you correct the IMU to real world coordinates system? I have not been able to found it. My coordinate system is not the same (X to the front, Y to the left and Z to the top), what make the algorithm fail
Thanks!
The text was updated successfully, but these errors were encountered:
Great work, code and paper!
When looking at the datasheet of the ADIS16448 and your paper, your dataset should have X to the right of the helmet, Z axis to the front and Y axis down. This can be confirmed with the bag values (please correct me if I'm wrong)
Similar, the camera matrix rotation need to be corrected to fit the IMU as this is the body frame (as indicated in the paper).
Question: Where do you correct the IMU to real world coordinates system? I have not been able to found it. My coordinate system is not the same (X to the front, Y to the left and Z to the top), what make the algorithm fail
Thanks!
The text was updated successfully, but these errors were encountered: